
Mecanum Bot
Why Make It?
During FRC (First Robotics Competition) in high school, I was introduced to the concept of mecanum wheels. Thsese wheels seemed like magic to me, as they allowed a robot to move in any direction. I wanted to build a robot that used them, but as a team, we never decided that they would give us a significant advantage. During Freshmen year at Olin, I started thinking about how mecanum wheels work, and what is required of them. Fom a mechanical design perspective, I found that they are very interesting, because they have diagonal rollers which have to be shaped such that the profile of the wheel is still circular. To see how that works, I decided to CAD a mecanum wheel, after which I quickly realized I could use a 3D printer to make a mecanum wheel with a very different design from any I had seen.
Results
The vehicle I ended up building works very well, traveling smothly in any direction.
Design
After tweaking my design to make mecanum wheels which fit in the form factor of a more traditional wheel, I decided to print them and make myself a remote controlled mecanum drive robot. I was able to 3D print the wheel hubs, as well as the rollers to get all of the precise geometry correct, then use some small steel rod and brass tube to act as axles and bearings for the rollers and two breadboards back to back to act as the chassis and hold the elcectronics. The wheels are direct driven off of small gear motors, and the pieces which attach the wheels to the breadboards are also 3 printed. Another cool piece of this design is the articulating chassis. Because the entire robot is so small and light, I wanted it to have an articulated chassis to help keep all of the wheels on the ground. The hinge I inclued was included in the forward 3D printed bulkhead. I got the design for the hinge from Alex Crease, and was able to print the hinge fully assembled in a single print so that it could not be dissassembled. This works very well, and allows the robot to run on much more uneven terrain than it could handle otherwise.
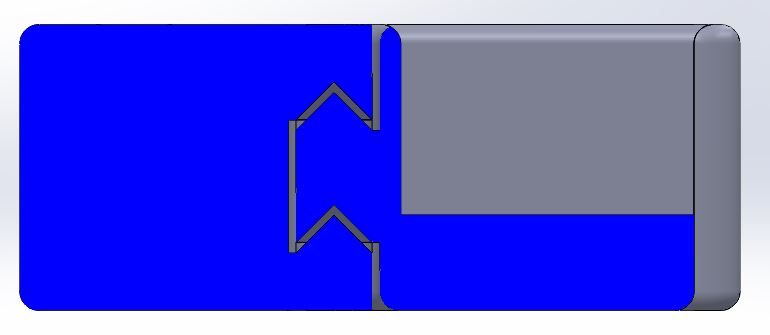
Cross section of 3D printed hinge